ROBOTICS
IMAGINE
AUTOMATION
ROBOTICS
KINOVA



KINOVA is a global leading company in robotic platforms and applications for personal assistance.
Robot arms of KINOVA has 4- to 6-shaft based joints and in particular, as one of its advantages,
the arm is moved just like that of human. Being proud of free movement and light weight, it is
widely used in research institutes, rehabilitation facilities and laboratories at home and abroad.
Robot arms of KINOVA has 4- to 6-shaft based joints and in particular, as one of its advantages,
the arm is moved just like that of human. Being proud of free movement and light weight, it is
widely used in research institutes, rehabilitation facilities and laboratories at home and abroad.
GEN 2

| Degree of freedom | 6 Dof | ||
|---|---|---|---|
| No Gripper | 2 Fingers (KG-2) |
3 Fingers (KG-3) |
|
| Total Weight | 4.4kg | 5kg | 5.2kg |
| Payload capabilities(Mid-range continuous) | 2.6kg | 1.8kg | 1.6kg |
| Payload capabilities(Full-reach peak/temporary) | 2.2kg | 1.5kg | 1.3kg |
| Maximum reach | 90cm | ||
| Degree of freedom | 7 Dof | ||
|---|---|---|---|
| No Gripper | 2 Fingers (KG-2) |
3 Fingers (KG-3) |
|
| Total Weight | 5.5kg | 5.98kg | 6.18kg |
| Payload capabilities(Mid-range continuous) | 2.4kg | 1.6kg | 1.4kg |
| Payload capabilities(Full-reach peak/temporary) | 2.1kg | 1.3kg | 1.1kg |
| Maximum reach | 98.5cm | ||
GEN 3

| Degree of freedom | 6 Dof |
|---|---|
| Total Weight | 7.2kg |
| Payload capabilities(Mid-range continuous) | 4kg |
| Payload capabilities(Full-reach peak/temporary) | 2kg |
| Maximum reach | 90.2cm |
| Maximum Cartesian translation speed |
50cm / s |
| Degree of freedom | 7 Dof |
|---|---|
| Total Weight | 8.2kg |
| Payload capabilities(Mid-range continuous) | 4kg |
| Payload capabilities(Full-reach peak/temporary) | 2kg |
| Maximum reach | 90.2cm |
| Maximum Cartesian translation speed |
50cm / s |
GEN 3 LITE

| Degree of freedom | 6 Dof(*Only 2 fingers) |
|---|---|
| Total Weight | 5.4kg |
| Payload capabilities | 500g |
| Maximum reach | 76cm |
| Maximum Cartesian translation speed |
50cm / s |
LINK 6

| Degree of freedom | 6 Dof |
|---|---|
| Continuous payload (full-range, at 200 mm from wrist) | 6.0kg / 13.2 Ibs |
| Maximum reach | 1000mm / 39.4 in |
| Maximum cartesian translation speed | 1.65 m/s / 5.41 ft/s |
| Power supply voltage and frequency | 110-240 VAC, 50 Hz - 60 Hz |
| Ambient operating temperature | 0 °C to 40 °C / 32 °F to 104 °F |
| Arm weight (with 5 m cable) | 23.45 kg / 51.7 lbs |
| Arm materials | Aluminum, ABS plastic |
| Installation orientation | All |
| Robot base footprint diameter | 149 mm / 5.86 in |
OPTIONAL PARTS




INOVATION
We develop our own robot and application by collaborate with global leading companies.
-

KINOVA MOVO
-

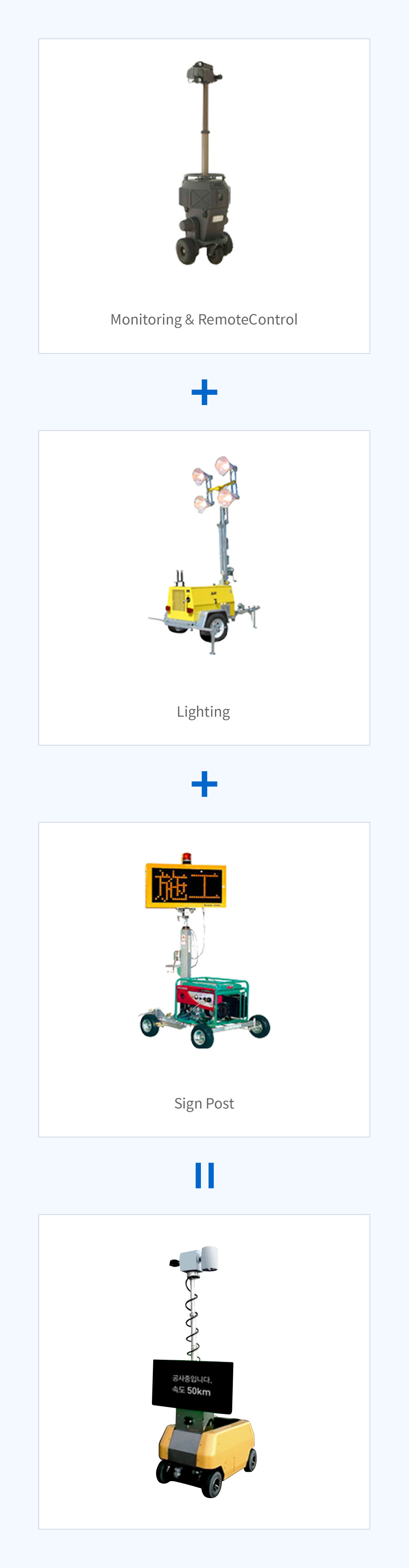
Traffic safety robot (Safer, Safe+Keeper)